| 基于激光雷达和Kinect相机点云融合的单木三维重建 |
| |
| 作者姓名: | 彭孝东 何静 时磊 赵文锋 兰玉彬 |
| |
| 作者单位: | 华南农业大学电子工程学院(人工智能学院),广州 510642;国家精准农业航空施药技术国际联合研究中心,广州 510642;农村农业部华南智慧农业公共研发中心,广州 510520;华南农业大学电子工程学院(人工智能学院),广州 510642;国家精准农业航空施药技术国际联合研究中心,广州 510642;华南农业大学电子工程学院(人工智能学院),广州 510642;农村农业部华南智慧农业公共研发中心,广州 510520 |
| |
| 基金项目: | 广东省重点领域研发计划项目(2019B020214003);岭南现代农业实验室科研项目(NT2021009);高等学校学科创新引智计划(D18019);“十四五”广东省农业科技创新十大主攻方向“揭榜挂帅”项目(2022SDZG03) |
| |
| 摘 要: | 
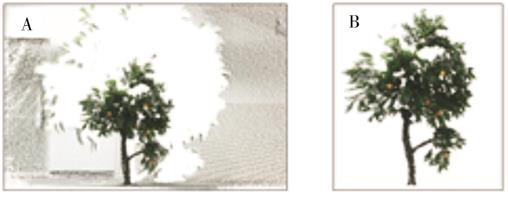
为了更好地建立单木三维彩色模型,获得准确表型参数,提出了一种基于Kinect v2相机和激光雷达的单木点云信息融合检测方法。首先由激光雷达采集樱树单木所在区域的完整环境点云,生成点云地图;由Kinect相机采集樱树单木多视角点云得到完整的三维彩色点云;然后以激光雷达点云位置为基准,通过选取对应同名点的方式对2种点云进行初始配准,使点云之间具有良好的初始位置关系,再使用最近点迭代(iterative closest point, ICP)算法对点云进行精配准;最后使用彩色点云对雷达点云进行点云着色融合处理,实现樱树单木的三维重建。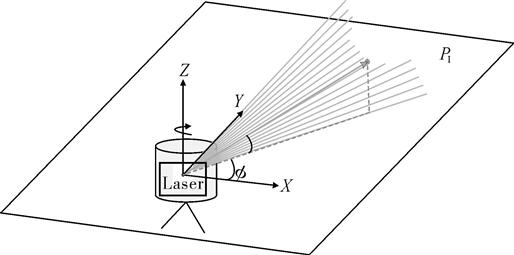
结果显示:与只使用Kinect v2相机生成的樱树单木表型参数对比,融合后的樱树单木的株高、冠幅和胸径的平均相对误差分别降低了1.52、6.46和18.17个百分点。研究结果表明,Kinect v2深度彩色相机和激光雷达在单木三维重建上能实现优势互补,提升点云配准精度,同时,既能降低光照气候条件的影响,又能增加测量距离,单木表型参数更准确。
|
| 关 键 词: | Kinect相机 激光雷达 三维点云 点云融合 冠层特征信息 作物表型检测 数字果园 精准农业 |
| 收稿时间: | 2022-05-27 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《华中农业大学学报》浏览原始摘要信息 |
|
点击此处可从《华中农业大学学报》下载全文 |
|