| 基于遗传算法优化模糊PID的甘蔗收获机切割器控制系统 |
| |
| 作者姓名: | 李腾辉 周德强 何冯光 邓干然 崔振德 王翔 陈自宏 |
| |
| 作者单位: | 江南大学机械工程学院,无锡 214122;江南大学机械工程学院,无锡 214122;江苏省食品先进制造装备技术重点实验室,无锡 214122;中国热带农业科学院农业机械研究所/农业农村部热带作物农业装备重点实验室/广东省农业类颗粒体精量排控工程技术研究中心/湛江市类颗粒体动力学及精准精量排控重点实验室,湛江 524091;雷州雷宝机械有限公司,湛江 524200 |
| |
| 基金项目: | 湛江市科技发展专项(2020A01005);中央级公益性科研院所基本科研业务费专项(1630132022001);湛江市科技计划项目重点实验室建设专题(2020A05004) |
| |
| 摘 要: | 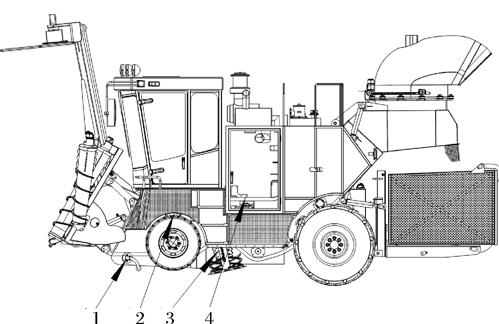
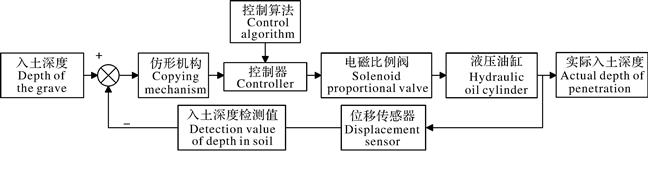
针对甘蔗收获机切割器无法自动控制入土深度,从而影响收获质量的问题,设计一套甘蔗收获机切割器入土深度自动控制系统。该系统主要包含角度式仿形机构、入土深度检测系统以及液压系统和控制系统。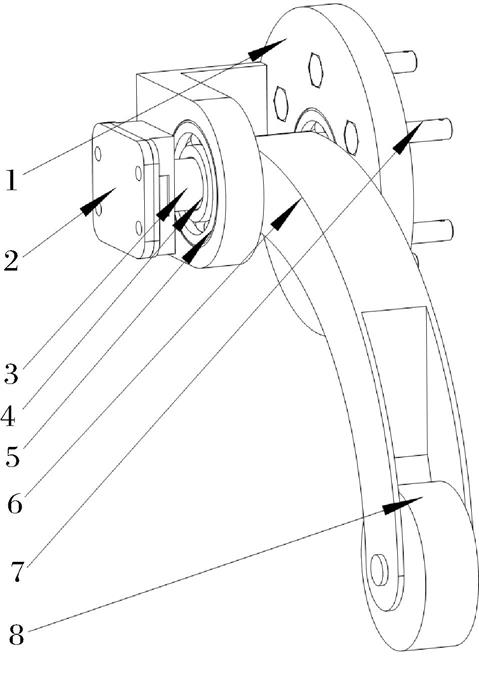
利用基于遗传算法优化的模糊PID控制算法进行入土深度的实时调节,通过Simulink阶跃响应以及带随机干扰的阶跃响应仿真,结果显示:基于遗传算法优化的模糊PID控制算法超调量为4.9%、调节时间为1.535 s,与PID控制算法以及模糊PID控制算法相比均有所改善。室内试验结果表明,基于遗传算法优化的模糊PID控制算法误差在(-0.5,0.5),误差最小,有效实现了切割器入土深度自动控制。
|
| 关 键 词: | 甘蔗收获机 遗传算法 模糊PID 深度检测 仿形机构 智能农机 |
| 收稿时间: | 2022-07-21 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《华中农业大学学报》浏览原始摘要信息 |
|
点击此处可从《华中农业大学学报》下载全文 |
|